|
水下地形测绘是获取水深和水下地形的一种测量工作,在国民经济建设中有着巨大的作用。传统的水下地形测绘方法主要有人工手持RTK水下测量、皮划艇搭载测深仪+定位系统以及租赁船只搭载测深仪+定位系统三种,三种方式的应用范围不同,都有着各自的优缺点。人工手持RTK水下测量方式成本低、机动性强,但是适用于浅水区域,应用范围窄、人员安全性得不到保障,一般不采用此种测量方法;皮划艇搭载测深仪+定位系统测量方式成本低、使用便捷,适用于中小静水河道及水库水下地形测量,但是稳定性较差、精度测量不均匀且艇上人员安全性较差;租赁船只搭载测深仪+定位系统稳定性和安全性较高,在深水测量应用较为广泛,但其成本高、手续复杂、灵活性较差,无法在浅滩进行测量。

华微3号无人测量船
无人船是基于无人驾驶遥控船为载体,集成了控制、动力推进、无线通讯、卫星导航定位、测深、声呐避障、摄像等多种系统,可快速精确地按照规划路径获取水下地形数据,体积小、重量轻、吃水浅,具有高效、灵活、自动化等优点,广泛应用于中小河流,湖泊,水库,港湾,近海区域水下测量领域。
湛江京信东海电厂2×600MW级“上大压小”热电联产燃煤机组工程中需测量海边一处水库水下地形,采用微型无人船对水库进行水下地形测量,测区长约300m,宽约为200m,测量时海风较大,水面有较大的起伏。采用传统的租用渔船搭载单波束方式进行测量成本较高,工期难以满足要求。

用专用软件连接无人船后,需根据不同的测区环境设置相应参数后方可下水测量,参数设置主要包括GPS导航定位和水深测量等系统设置、坐标系统设置以及无人船测量路径规划,使无人船能够沿着规划的路径对测区实施有效测量。
参数设置完成后,无人船即可下水。无人船操控模式有自动和手动两种,自动模式时会沿着设置好的路径按照一定的采样间隔自动采集水深数据直至规划的路径全部测完,然后自动返回至起始点位置,对于自动模式难以测量的犄角旮旯里可采用手动模式操控无人船进行补测,达到覆盖全测区的目的。遇到障碍物时,无人船会根据声呐避障系统自动做出避让反应,以确保无人船的安全。
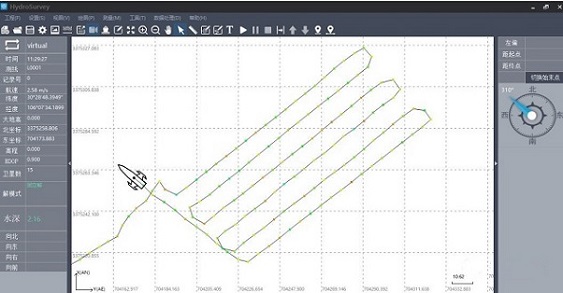
无人船在既定航线行驶过程中,导航软件会实时显示船只位置、采样点的水深及水底高程。
无人船自动测量在导航处理软件中的显示如下:

无人船自动测量时会在数据处理软件中的显示如下:
数据采集完成后,需要对采集的数据进行后处理,滤除由于水浪造成的测量误差,最后转换成所需要的格式,将RTK采集的若干近岸水底高程数据和无人船采集的数据进行比对后,两者基本吻合,表明无人船采集的数据具有较好的精度和较高的可靠性。
三维成果展示模式: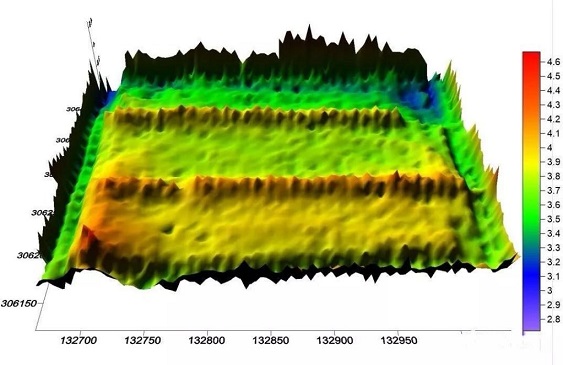
无人船水下地形测量方式的出现为浅水领域提供了很好的解决方案,解决了内河航道,水库,码头,海湾,近海等水域测量的难题,在基础测绘、航道清淤、安全搜救等领域发挥着不可替代的作用。
|